Les systèmes de gestion du stationnement pourraient se diriger vers la 3D
Les villes du monde entier expérimentent des moyens plus intelligents de gérer le stationnement. Certains utilisent les données d'occupation du stationnement pour ajuster dynamiquement les prix, garantissant ainsi une disponibilité d'espace adéquate ; d'autres déploient des systèmes de stationnement en bordure de route équipés de capteurs au sol, les intégrant dans des plateformes de villes intelligentes plus larges ; d'autres encore utilisent des capteurs en réseau pour surveiller des milliers de places de stationnement individuelles. Ces initiatives partagent un objectif clair : réduire la congestion automobile, améliorer l’efficacité du stationnement en bordure de route et utiliser plus efficacement l’espace urbain limité.
Bien que cessystèmes de gestion de stationnementont été mises en œuvre dans de nombreux pays à travers le monde, nombre d’entre elles s’appuient encore sur des données fragmentées ou incomplètes. L'installation et la maintenance à grande échelle de capteurs au sol/détecteurs de boucle sont coûteuses, tandis que les systèmes de surveillance par caméra peuvent être sensibles aux conditions d'éclairage ou soulever des problèmes de confidentialité. Alors que les villes cherchent à intensifier leurs initiatives de stationnement intelligent, le défi ne réside pas seulement dans la collecte de données, mais aussi dans la manière de le faire de manière fiable, efficace et à grande échelle.
La technologie LiDAR commence à gagner du terrain dans le secteur des systèmes de gestion du stationnement. LiDAR, acronyme de Light Detection and Ranging, utilise des impulsions laser pour capturer avec précision des informations tridimensionnelles sur l'environnement physique, fournissant ainsi une base de données solide pour la gestion moderne du stationnement. De la surveillance de l'occupation des places de stationnement à la classification des types de véhicules, les systèmes basés sur LiDAR permettent aux opérateurs d'obtenir des informations sur la dynamique du stationnement avec un niveau de granularité que les solutions traditionnelles ont du mal à égaler.

Pourquoi le LiDAR est-il bien adapté aux systèmes de gestion de stationnement intelligents ?
À la base, le LiDAR fonctionne en utilisant des impulsions laser pour mesurer les distances. Ces mesures génèrent une représentation dense et tridimensionnelle de l'environnement, connue sous le nom de « nuage de points ». Contrairement aux images de la caméra, ces données ne sont pas affectées par les conditions d'éclairage ambiant ; au lieu de cela, il décrit la géométrie de l’environnement avec une grande précision.
Ces données 3D offrent de nombreux avantages pour les applications de stationnement.
Premièrement, le LiDAR maintient des performances constantes dans des conditions environnementales en constante évolution. Les facteurs qui compromettent généralement les systèmes de caméra, tels que l'obscurité, l'éblouissement ou les ombres, ont un impact minime sur les mesures laser. Cela rend le LiDAR particulièrement adapté aux parkings extérieurs, aux garages et aux environnements en bordure de route où les conditions d'éclairage fluctuent tout au long de la journée.
Deuxièmement, le LiDAR capture les structures physiques plutôt que les apparences visuelles. Les véhicules, bordures, obstacles et piétons sont tous détectés comme des objets tridimensionnels. Cela permet aux algorithmes d’identifier et de suivre les objets de manière fiable sans avoir à analyser au préalable des images bidimensionnelles sujettes à des interprétations erronées.
Enfin, les données LiDAR prennent en charge une surveillance soucieuse de la confidentialité. Étant donné que cette technologie mesure la distance plutôt que les détails visuels, elle ne capture pas les caractéristiques identifiables, telles que les visages humains ou les plaques d'immatriculation, à moins d'être complétée par des capteurs supplémentaires. Pour les communes et les opérateurs confrontés à des exigences strictes en matière de protection des données, cela peut constituer un avantage considérable. Collectivement, ces caractéristiques font du LiDAR une base puissante pour les systèmes de stationnement basés sur les données.

Surveillance de l'occupation : LiDAR dans les applications pratiques du système de gestion du stationnement.
L’une des applications les plus directes du LiDAR dans les environnements de stationnement est la surveillance de l’occupation des véhicules.
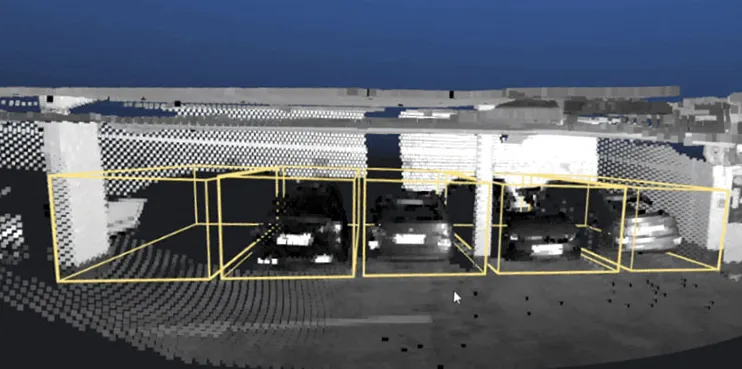
Dans un scénario d'installation typique, les capteurs LiDAR sont montés sur une infrastructure existante, telle que des poteaux d'éclairage ou des façades de bâtiments, surplombant un parking ou une rue. Les capteurs scannent en permanence leur environnement, générant un flux de points de données 3D. Un logiciel traite ces données en temps réel pour détecter les objets, déterminer leur emplacement précis et les classer.
Des places de stationnement peuvent être désignées au sein du système. Lorsqu'un véhicule entre dans la zone surveillée, les capteurs le détectent dans le nuage de points en identifiant un objet qui n'était pas présent auparavant. Les points détectés déclenchent une modification de l'état d'occupation de la place de stationnement. Au départ du véhicule, la place est ensuite à nouveau marquée comme disponible.
En raison de l’extrême précision des données LiDAR, des seuils de taille peuvent être établis pour les objets détectés dans chaque zone de surveillance. Cela garantit que les petits objets, tels que les caddies, les débris ou les piétons qui passent, ne déclenchent pas de fausses occupations. Une place de stationnement est marquée comme occupée uniquement lorsque l'objet détecté dépasse les paramètres prédéfinis (par exemple, les dimensions typiques d'un véhicule). Ce mécanisme de filtrage configurable améliore la précision de la détection, garantissant des données d'occupation fiables même dans des environnements complexes caractérisés par des mouvements fréquents de véhicules.
Le LiDAR étant capable de capturer des informations spatiales complètes, un seul capteur peut souvent surveiller plusieurs places de stationnement simultanément. Dans des environnements structurés, tels que des parkings ou des zones en bordure de rue avec des limites clairement définies, une seule installation peut couvrir efficacement une zone entière.
S’il est utile de savoir si une place de stationnement est occupée, comprendre « ce qui » l’occupe peut s’avérer encore plus précieux.
Basé sur LiDARsystèmes de gestion de stationnementpeut classer les véhicules en fonction de leur taille et de leur forme. En analysant la géométrie 3D capturée dans le nuage de points, les algorithmes peuvent distinguer des catégories telles que les voitures particulières, les camionnettes, les camions ou les véhicules à deux roues.
Ces informations ouvrent la porte à un large éventail d’applications pratiques. Par exemple, les opérateurs peuvent analyser si les places de stationnement en bordure de rue, initialement destinées au dépôt de passagers à court terme, sont fréquemment occupées par des camionnettes de livraison. De même, les données concernant les gros véhicules peuvent aider les villes à évaluer la demande de stationnement dans les zones de chargement ou dans les parkings commerciaux.
La classification des véhicules facilite également une application plus efficace. Si la réglementation interdit à certains types de véhicules d'utiliser des espaces spécifiques, les systèmes de surveillance automatisés peuvent signaler des violations potentielles pour examen.
Dans les parkings, les données de classification des véhicules aident les opérateurs à comprendre l'impact des véhicules de différentes tailles sur la capacité et l'efficacité de la circulation. À mesure que les flottes de véhicules urbains se diversifient de plus en plus, allant des véhicules électriques compacts aux gros camions de livraison, ces informations deviennent de plus en plus cruciales pour la planification des installations.
Il est important de noter que ces analyses reposent sur des caractéristiques tridimensionnelles plutôt que sur la reconnaissance visuelle. Le système peut identifier un objet comme ayant les dimensions et la forme d'une camionnette ou d'un camion sans avoir besoin de lire les plaques d'immatriculation ou de capturer des détails visuels.
Le secteur du stationnement passe progressivement d’une infrastructure statique à une gestion dynamique basée sur les données. Cette transition nécessite d'équilibrer diverses demandes concurrentes, notamment les véhicules privés, le transport de marchandises, les services de mobilité partagée et l'utilisation de l'espace public, dans le cadre de la capacité limitée des trottoirs et des parkings.
Alors que les villes continuent de repenser le rôle du stationnement au sein de l’écosystème des transports au sens large, les technologies capables de fournir des données précises et respectueuses de la confidentialité joueront un rôle de plus en plus vital. Le LiDAR apparaît rapidement comme un outil clé permettant aux opérateurs de visualiser les infrastructures de stationnement sous un nouvel angle au sein de leurs systèmes de gestion du stationnement.